


Adam
• Adam
机器人亚当
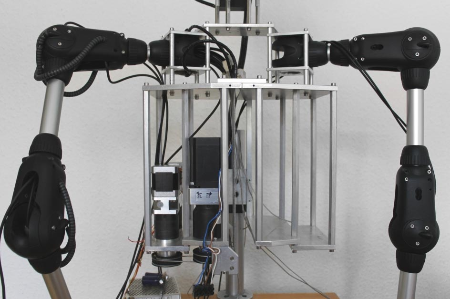
学习神经生物专业的德国学生Malte Ahlers研制出一台半身仿人机器人,并取名亚当(高级双臂协调操作机器人),简称A1。尽管个机器人项目仍处于研发初期,但与之相关、硬件方面的研究已进行了两年左右。

和许多偏好使用Robotis公司(或其他公司)伺服电机的个人项目不同,机器人亚当的双臂通过选用德国Igus公司生产选用机器关节实现了五级自由度。
亚当身上的机器关节既可以绕轴旋转又可以全方位旋转- 这样的设计特别适合搭建机械手臂- 但全方位旋转需要更多电缆(像一个滑轮:一个用于顺时针方向,另一个用于逆时针方向)。这致使大量的电缆必须缠绕在机器人躯干里的行星齿轮式减速机上,为了对减速机进行定位控制,设计师又安装了一个电机控制器用来读出这些关节里编码器的信号。作为概念验证,Malte Ahlers公布了一段亚当肩部活动过程的视频。
视频:
我的工作和标准机器人伺服电机相比这么做让变的复杂又繁重!特别是现在许多公司都开始为强大的伺服电机提供所需的扭矩用来驱动亚当这样的机械手臂。但好的一面是,手腕的额外自由度(和脖子的二级自由度)可以被更简单的步进电机驱动了。
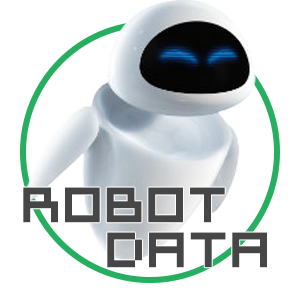
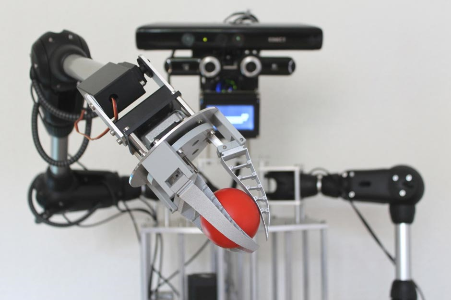
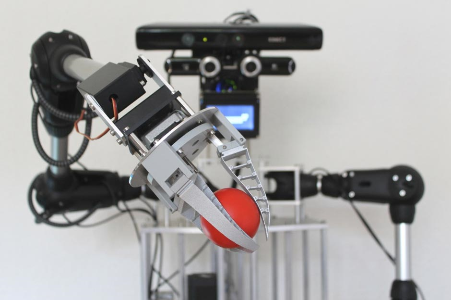
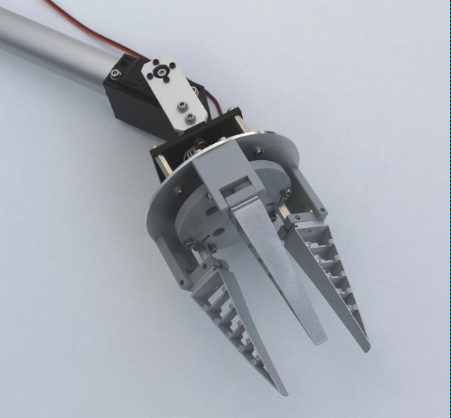
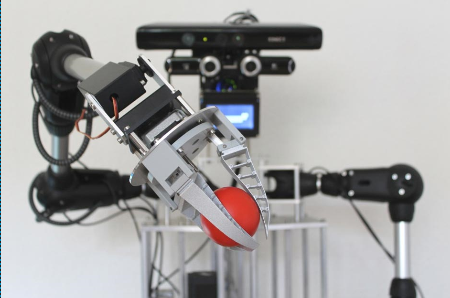
为了使亚当的双手更灵活,Malte Ahlers运用FESTO公司简单却高度灵活的FinGrippers。FESTO是一家以设计仿生机器人闻名的德国公司。仅仅通过一台马达驱动,就能使三根手指配合自然流畅的夹取小球或其他尺寸的物体。最后值得一提的是,亚当的脑袋(放置在自由度2级的脖子上)上有一个Microsoft Kinect传感器和两个Logitech QuickCam Pro 9000摄像头。一个能播放合成语音的扬声器和一块显示二次元风格“嘴唇”的LCD板。
尽管现在机器人亚当的研究进展已令人印象深刻,但希望不久的未来Malte能带给我们更多的惊喜。



相关阅读:
- Mani Zamani’s 3D打印关节型机器人雕塑
- 视频:机器人足球练习赛
- 看看DARwln-OP怎样堆叠到NAO
- 第三届西班牙双足机器人竞赛开幕
AcYut
Affetto