
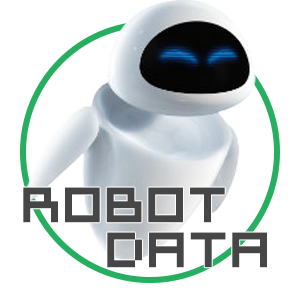


HECTOR
Bielefeld大学生物控制论系公布了一款非比寻常的超酷六足机器人。尽管它外形未来感过强,但HECTOR(表示 HExapod Cognitive auTonmouslyOperating Robot)整体还是酷似只一米的昆虫;它的控制程序基于了自然界中昆虫大脑的智能分布原则。就像真的昆虫一样,HECTOR的外置骨骼非常轻盈但有十分结实,整个外置结构仅占总重量的13%(12公斤[26磅])。通过和德累斯顿莱布尼茨高分子研究所一些合作并进行机体优化,HECTOR的碳纤维增强塑料外壳在30公斤(66磅)的载荷下变形仅小于1毫米。它同样采用仿生学的关节设计;通过采用仿生执行器研究小组UNI的机电进行全国最先进的弹性共同驱动,目前Hector每个关节有20个自由度(6腿X3,体节×2)。

“我们希望通过引入规划理念,以推广关于这种行走概念的认知和智能化水平,为以后开发人工智能机器人奠定坚实的基础,”Axel Schneide博士说,“并且实现,打个比方,比如什么时候当被困住后机器人能自己在地上打洞逃走,或者它是怎么制定逃跑计划的。”他和Josef Schmitz博士是该项目的负责人,之前两人在制作六足机器人TARRY时就有过合作。



HECTOR将用于CITEC,丹麦,德国,意大利,欧盟EMICAB(Embodied Motion Intelligence for Cognitive, 六足机器人)部门项目的实验室中研究先进机器人自我行走。该机器人将学会行走并在不久的将来实现自我导航功能,因此现在我们能做的就是观看下面的官方视频。
这一块内容还向我们展示了 模块化的FloBi仿真头像。尽管我们暂时将目光转向了 Plastic Pals的仿真机器人,但我们更喜欢本文中这个炫酷的机器人。如果你和我一样,那你可能有兴趣了解fuRo公司配备了独特混合轮腿设计 的Hallucigenia-Iand Halluc-II机器人。
为什么我不爱Geminoids?
Hector