


猎豹机器人
发布时间2011
制作团队亚利桑那大学
国家美国
机器人属性美国本科生机器人
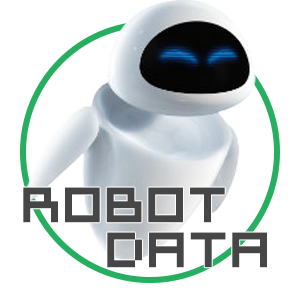
归功于Tony Lewis和本科生Batt Bunting的努力,Arizona大学机器人与神经网络实验室近日有了一台新的猎豹机器人,或者说至少半台(请别把它和MIT、CMU和Boston Dynamics的项目搞混)。Matt之前制作过一台六足机器人被Intel公司看中,他自己也因此有了一点小名声。

2011年ICRA上,这个研究小组曾公布过他们制造的猎豹后肢,但遗憾的是当时的演示视频并未展现出官方文案所写的内容(接卸猎豹的后退能像真实猎豹一样从半蹲姿势又快又狠的踢出来)。这款机械腿运用了混合驱动的概念,装配了结合能量气动致动器并能精确定位提供脉冲串的电子电机(RX-64s)。机械腿的外壳由 Solidworks设计后通过亚利桑那机器人科技&神经系统实验室的3D打印机进行打印。这款猎豹机器腿只有前半个脚掌,这是因为之前的BigDog已经证明,做出整个脚掌其实没什么意义(尽管我猜测他们可能会给机械脚上增加某种弹性悬架)。
上一篇
DmitryAndroid
DmitryAndroid
下一篇
EveR-4
EveR-4